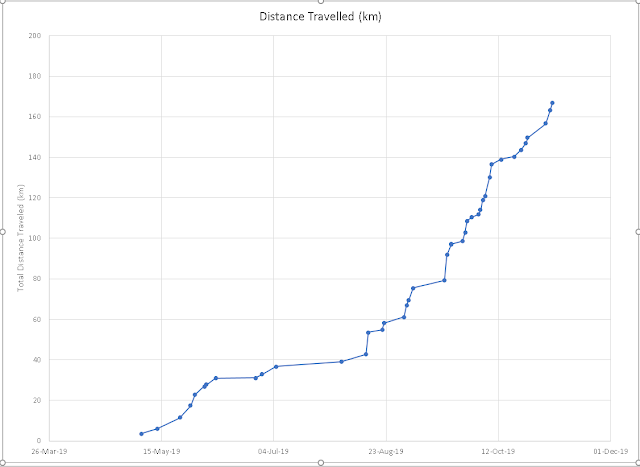
Since scaling back the original one year distance goal from 1000 km to 200 km, I've been working hard at testing AMOS, trying to reach the 200 km total distance traveled mark before the water freezes over. Right now it's at 167 km, so it's within reach. This past week had a few good test days; with the 10 A-H battery and the weak November mid-morning sun shining, AMOS can go for almost 7 km before it detects the charge getting low and heads for a re-charging location (i.e. one of about 6 predefined spots on the north shore of the river that have good sun coverage and are a bit hidden from populated areas. Rather than hope that it will stay in the re-charging location and charge, I have been just towing the boat back home and plugging the battery into a wall charger. Sort of a cheat I guess, but there are only a few useful solar charging hours at this time of year. In these tests, AMOS has been performing really well. Earlier tests in October were done using my laptop to start a shell connection to the Raspberry Pi and initiate the commands to get it going. I eventually discovered though that the program would suspend itself as soon as the boat got out of WiFi range. So now I've just set AMOS to start itself automatically after booting up, and the program has been running smoothly, at least the last 3 times that I've tried it. I've also tweaked the LiDAR avoidance code a bit, to avoid making too many unnecessary turns.
It's too bad that the boat wasn't ready for heavy testing in the summer months of this year; had it been capable of autonomous operation then, the 1000 km goal might have been achieved.
We are expecting 20 cm of snow here on Friday, and I might be having an arthroscope on my knee next week. But hopefully there will still be some opportunities to get AMOS to 200 km. ☺

No comments:
Post a Comment