(EDIT, Jan. 07, 2021: For more info on AMOS and In Nature Robotics, please also visit https://www.innaturerobotics.com/)
It pained me somewhat to carve up a brand new surfboard fresh out of the box, but I used the two AMOS electronics boxes as guides to carve out rectangular holes in the bow and stern and then wedged the boxes in. The fit was pretty snug, so I didn't bother gluing anything down:
I also had the new survey-grade antenna and GPS / RTK receiver board hooked up, so tried out the whole assembly on the weekend. The GPS / RTK receiver board seems to get pretty accurate GPS data fairly quickly, so only a short wait was required before AMOS took off on its course:
AMOS went up and down the river on the usual course that I had followed throughout the summer while collecting dissolved oxygen data, although this time it made the 2.75 km trip in only 33 minutes, shattering the old record of 43 minutes by 10 minutes! This included 17 ten second stops for water temperature samples, and some inefficient steering due to compass errors (see below). The improved speed made it more difficult to film while kayaking; I had to paddle hard to get ahead of it, pull out the phone, and then take some video:
This last video showed a bit of a problem that the compass was having with giving accurate heading when the boat should have been moving south. The compass error must have been pointed towards the southeast, because the boat would start in that direction, realize that the new target direction was southwest (or even west) to get to the next waypoint, and then move in a big curve to correct for the initial path error. The temperature in the electronics box started off at 8 degrees C at the start of the test, and fell to 3 degrees C by the end. The magnetometer calibration was done at -3 degrees C, so that might have been a source of error. And probably there was some error from the Z-axis (vertical) magnetometer on the compass, since it had never been calibrated on this unit, and the new inclined angle of the bow on this boat would have caused that magnetometer to come more into play for determining heading.
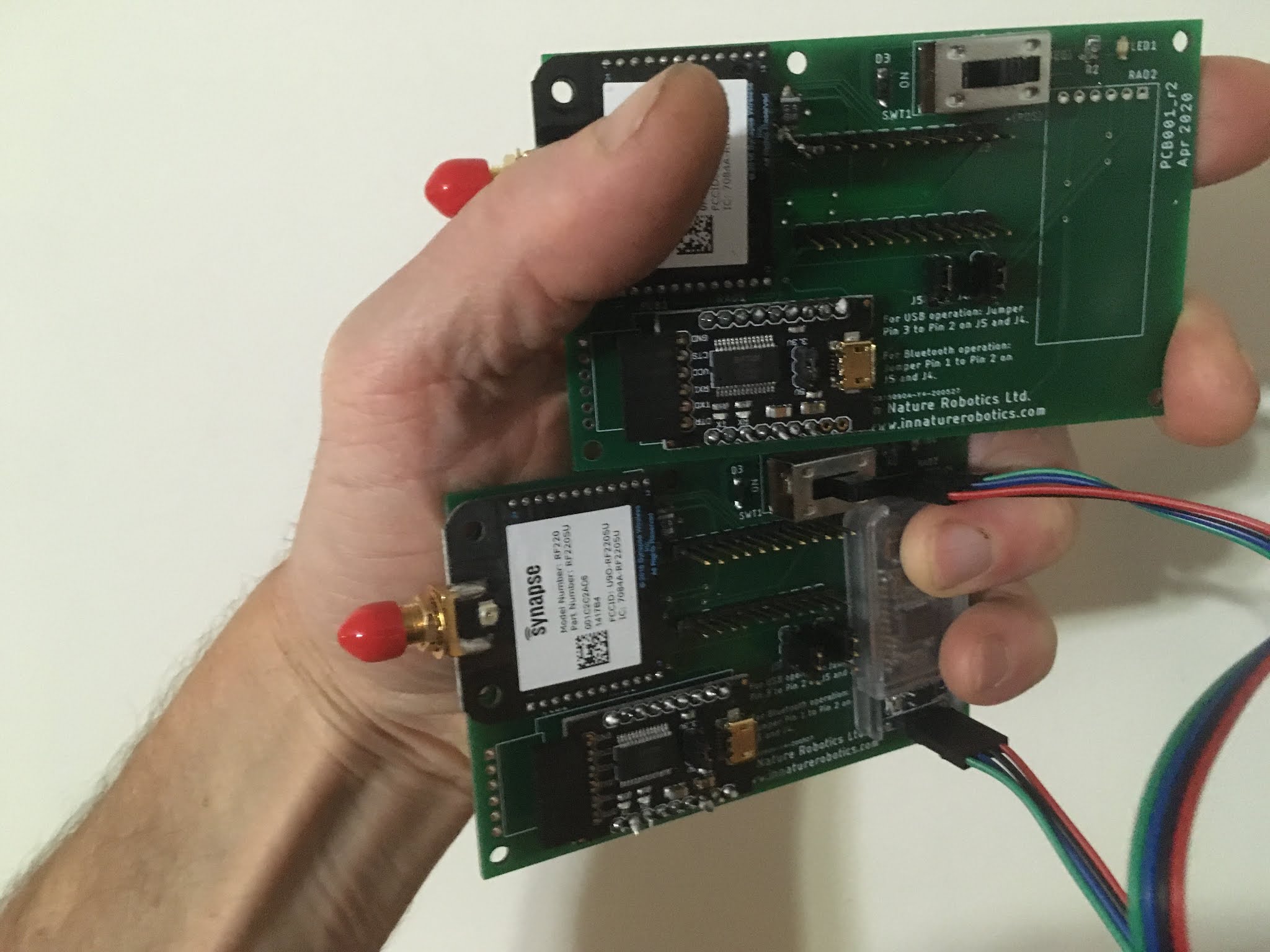
Yesterday I modified a pair of AMOSRemote wireless transceivers to pass through serial data at 115200 bps, in order to test out an RTK / GPS setup with a base station and rover. I put the base antenna on top of the playhouse:
and did a couple of slow walks with the boat just inside the fence line:
The results seemed pretty good:
although were slightly outside the corner of the fence when I walked behind the pool. Possibly some satellites were obstructed at this location, or perhaps the communications link between the playhouse and AMOS became a bit less than ideal at that time. Either way, some more testing will be required to quantify what sort of accuracy can be expected under various conditions and communications ranges. Also, it would be better to have the normal communications programs on the wireless transceivers merged in somehow with the RTK wireless serial link mode.
The weather is looking nice and warm (above zero!) for Christmas Eve, and a new 11" carbon fiber propeller arrived in the mail today, so possibly there will be an opportunity for some more river testing soon, before things freeze up. 😎