1. Finish map-based user software for planning routes for AMOS, and viewing previously saved data and live data. PC, iOS, and Android versions of this software will be required.
2. Create documentation for the robot and its associated user software.
3. Update website with software, documentation, product pages, and custom ordering software.
Some progress was made on the first of these this past week. The PC route planning software was updated to allow the user to define "safe" locations on the map (where AMOS can head to if it needs to re-charge) or picture locations where AMOS takes one or more pictures while pointed in a particular direction. The safe locations feature has been implemented on AMOS already, but the picture locations feature is something new. Possibly it's not a great idea to be adding new features at this point, but it seems like a feature that users would like, and it's not exactly straightforward to manually collect pictures with AMOS (like I have been doing up to now) by executing Linux shell commands. Right now the mapping software just requires the user to hold the 'S' key while left-clicking on the map to define a safe location, or hold the 'P' key while left-clicking to define a picture location.
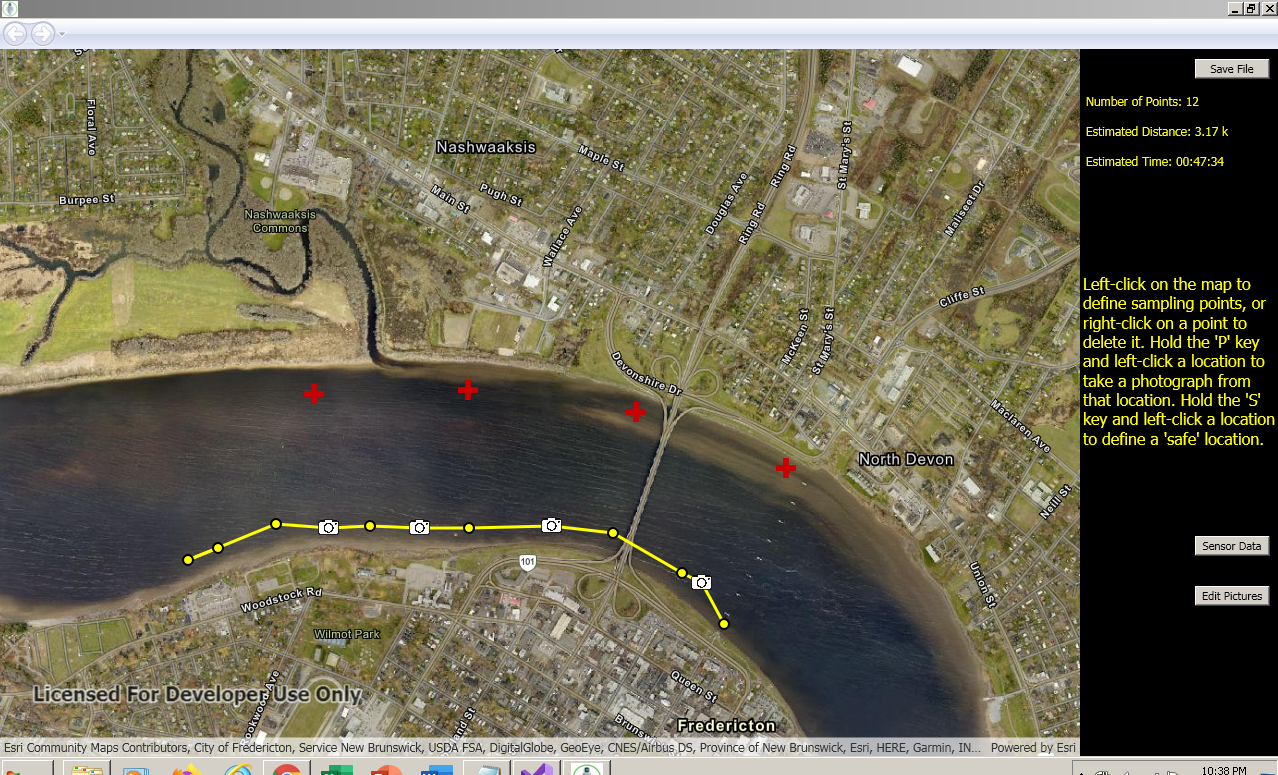
The picture locations will also require some other parameters for specifying camera direction and number of shots. These will be set in a separate interface that the user can bring up with the 'Edit Pictures' button.
A co-worker at Measurand had suggested that I apply to the Volta Cohort: https://voltaeffect.com/cohort/. So I spent a day working on answers to their application questions. I am sure they will be receiving a lot of applications, but if my submission makes their initial cut I will have to go down to Halifax on May 13 to pitch In Nature Robotics on stage against 14 other startups.
The circuit boards for the wireless module arrived successfully from China last week. Coincidentally I developed a cold yesterday, but I'm sure it's unrelated. I've got one board mostly populated, but am just waiting on an FTDI-breakout board, which also happens to be arriving from China.
I drew up some simple aluminum plates for holding the two foam pontoons of the Catamaran version of AMOS together. There will be two 30 x 40 cm plates at either end of the boat to support the electronics boxes, and two 15 x 40 cm plates to support the center part of the boat and give it some structural stiffness. Hopefully the same construction adhesive that I used to glue the foam together will also work on the aluminum. It seems to be pretty strong stuff. Once those are finished I'll apply a fiberglass coating to the pontoons.
No comments:
Post a Comment